Home » Applications » Dexarm: Dextrous Robot Arm for Space Applications
DEXARM: a Dextrous Robot Arm for Space Applications
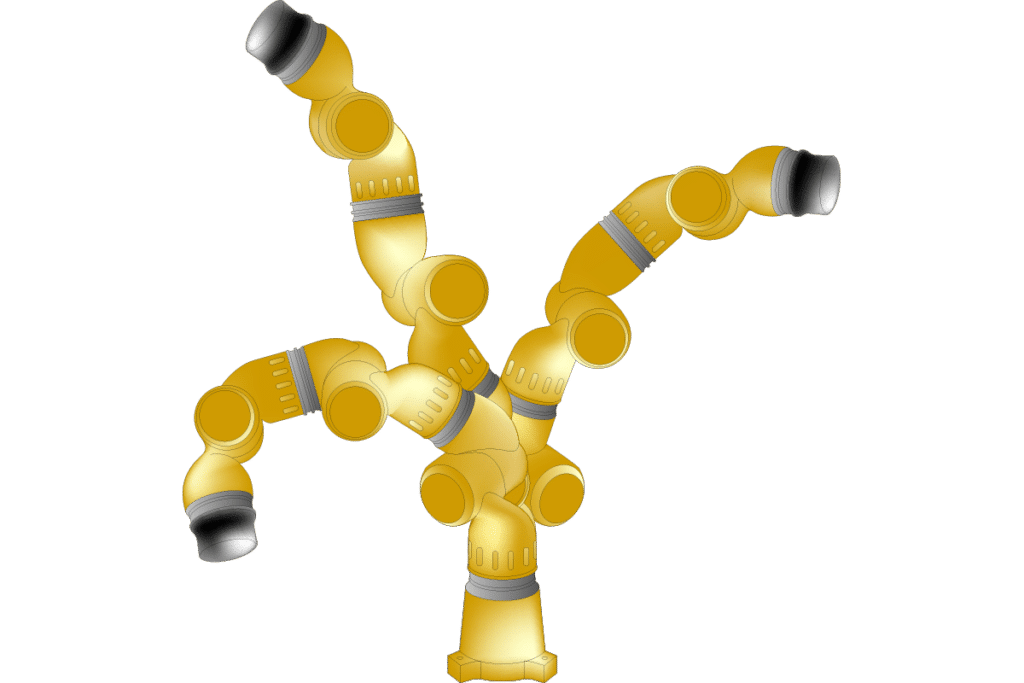
The goal of the DEXARM project is the development of a robot arm comparable in size, force and dexterity to a human arm, to be used for space robotics applications in which the manipulation/intervention tasks were originally conceived for humans. These applications are typically external or internal servicing of orbiting platforms or robotics for planetary exploration.
The main challenges of this development lay in the minimisation of resources that the applications require. To achieve this goal, ESA has encouraged the exploitation of innovative approaches and technologies to drastically minimise mass, volume and power consumption while providing adequate performance (output torque capability and positioning accuracy/repeatability).
The arm of DEXARM has been based on the most dexterous kinematics and geometrical configuration identified as output of the design phase. High performance and minimisation of resources have been pursued in any phase of the project for any components of the arm. Extensive design iterations were conducted for the joints, the electronics and the limbs, to minimise mass, dimensions and power, while ensuring the required performance. Particular attention has been given, already from the beginning, to make the design complete and to incorporate all features needed by higher level integrators to make use of the arm in the frame of their robotic systems. The result is a dextrous robot arm that can be qualified and utilised in the frame of future ESA flight programmes.