Exoskeleton systems let people hit by disabilities or accidents walk again, or provide extra force to move heavy loads.
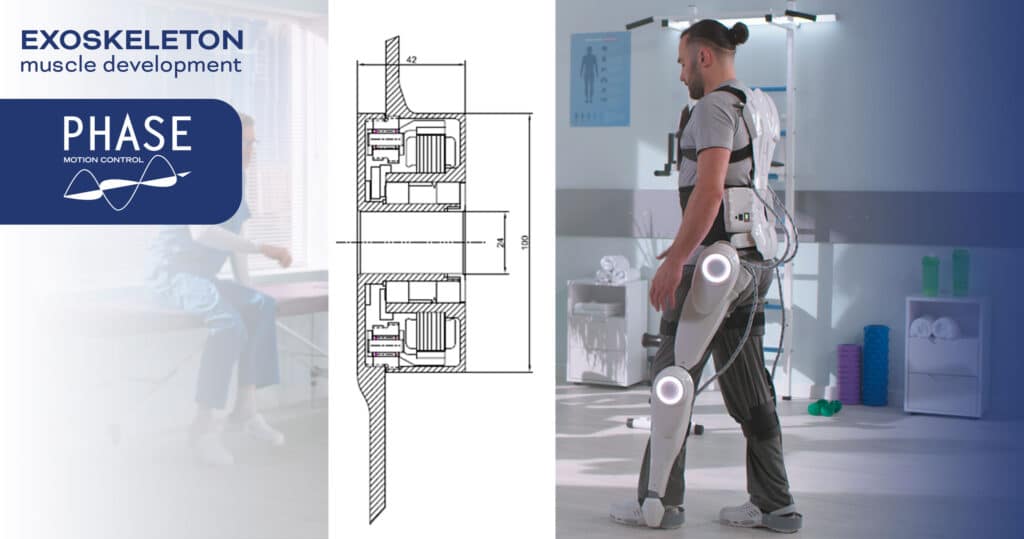
The hip and knee joints are particularly challenging from an actuation standpoint. To reproduce human functionality, a starting torque in excess of 100 Nm must be delivered, while the joint must be kept small, efficient and also cold, as it is in contact with the wearer’s body.
Current devices use highly geared, high speed motors. This solution has several drawbacks:
• High pitch “robot like” noise when walking
• High inertia: quick movements are near impossible
• Near Irreversible, which means that there is no tactile feedback when impacting an obstacle
• High mechanical complexity, significant cost, wear and maintenance
To solve this quandary, Phase R&D team developed and patented an integrated joint systems in which a high torque, outer runner PM motor is integral to the joint bearing system and low ratio, reversible gearing. The project is going through application testing.