I sistemi di esoscheletro consentono alle persone colpite da disabilità o incidenti di tornare a camminare o di fornire una forza supplementare per spostare carichi pesanti.
Le articolazioni dell’anca e del ginocchio sono particolarmente impegnative dal punto di vista dell’attuazione.
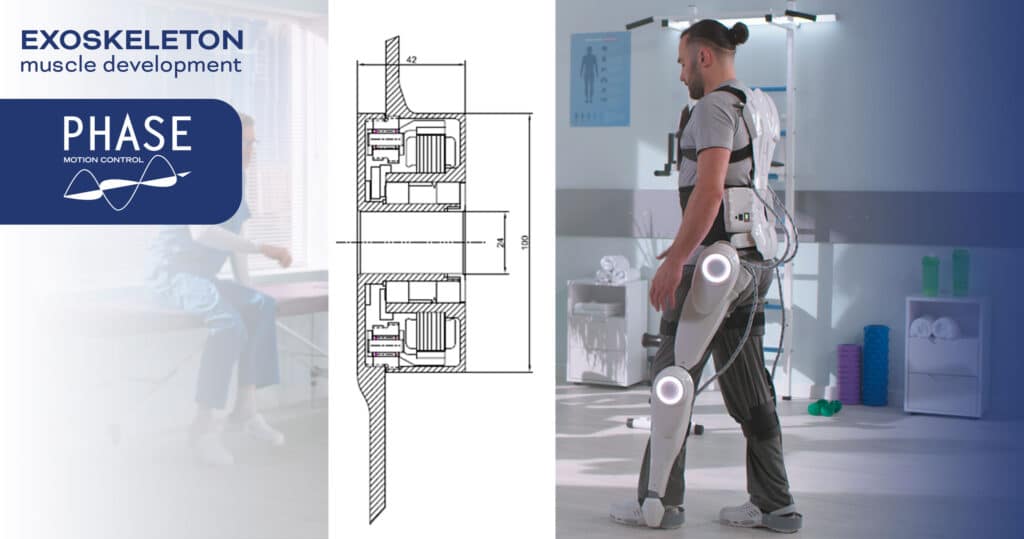
Per riprodurre la funzionalità umana, è necessario fornire una coppia di spunto superiore a 100 Nm, mentre l’articolazione deve essere mantenuta piccola, efficiente e anche fredda, poiché è a contatto con il corpo di chi la indossa.
I dispositivi attuali utilizzano motori ad alta velocità e a ingranaggi elevati. Questa soluzione presenta diversi svantaggi:
– Rumore acuto “simile a quello di un robot” quando si cammina
– Elevata inerzia: i movimenti rapidi sono quasi impossibili.
– Quasi irreversibile, il che significa che non c’è feedback tattile quando si impatta contro un ostacolo.
– Elevata complessità meccanica, costi significativi, usura e manutenzione
Per risolvere questo problema, il team di ricerca e sviluppo di Phase ha sviluppato e brevettato un sistema integrato di giunti in cui un motore PM a corsa esterna ad alta coppia è integrato nel sistema di cuscinetti del giunto e negli ingranaggi reversibili a basso rapporto. Il progetto è in fase di test applicativo.