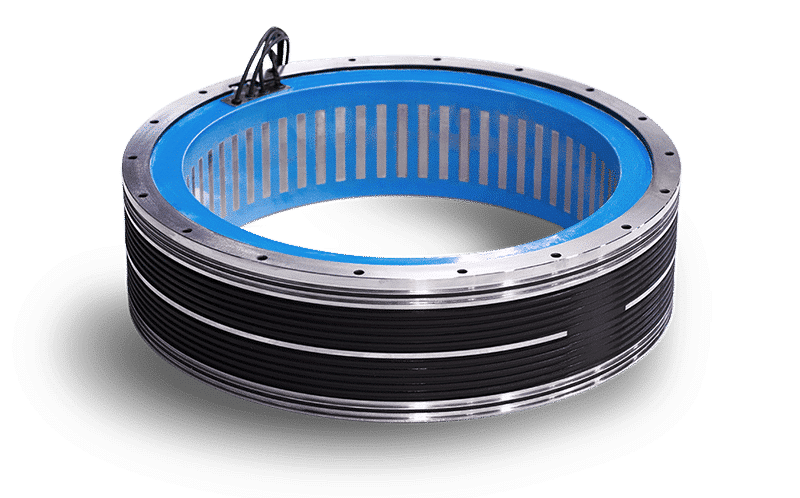
Immagina un mondo in cui potenza, precisione e semplicità si fondono in un’unica rivoluzionaria soluzione di movimento: I motori Torque.
Il rivoluzionario concetto di e-motor che elimina ingranaggi e accoppiamenti, grazie alla trasmissione diretta, garantisce una risposta immediata e una precisione senza pari.Anche i componenti meccanici, le parti in movimento, l’attrito, i guasti, il rumore e il consumo energetico sono fortemente ridotti.
I motori torque eccellono nelle applicazioni che richiedono movimenti veloci e fluidi, controlli estremamente precisi e rappresentano il futuro dell’industria del movimento elettrico.
Pronti a scoprire come questa rivoluzionaria tecnologia nel campo del motion control, porti prestazioni, efficienza e affidabilità a nuovi livelli prima inimmaginabili?


")




