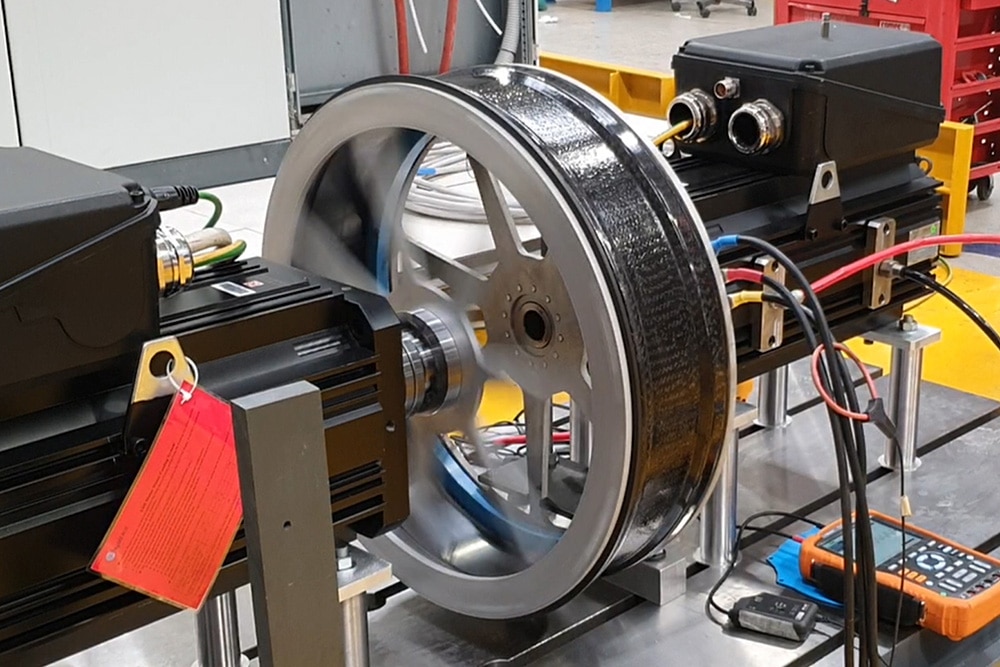
A differenza dei motori torque tradizionali, le unità ad accoppiamento diretto serie TK combinano coppia, velocità, e precisione garantendo prestazioni e versatilità superiori in particolare per applicazioni su mandrini e tavole rotanti.
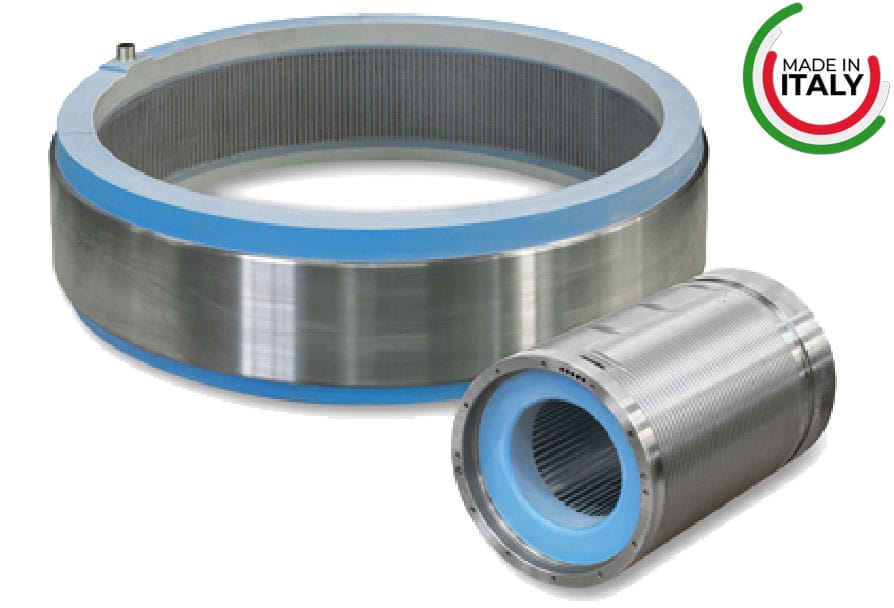
Utilizzando speciali magneti prodotti da Phase, i rotori dei motori coppia serie TK assicurano un funzionamento efficiente ad alta velocità con fattori di perdita minimi. Questa caratteristica progettuale contribuisce alle eccezionali prestazioni e all’affidabilità dei motori.
I motori TK, costruiti come unità trifase a magneti permanenti in terre rare (ferro neodimio boro), raggiungono una densità di coppia continua e di picco senza precedenti. Inoltre, offrono un controllo preciso della velocità e del flusso in un range di potenza costante fino a 10:1.
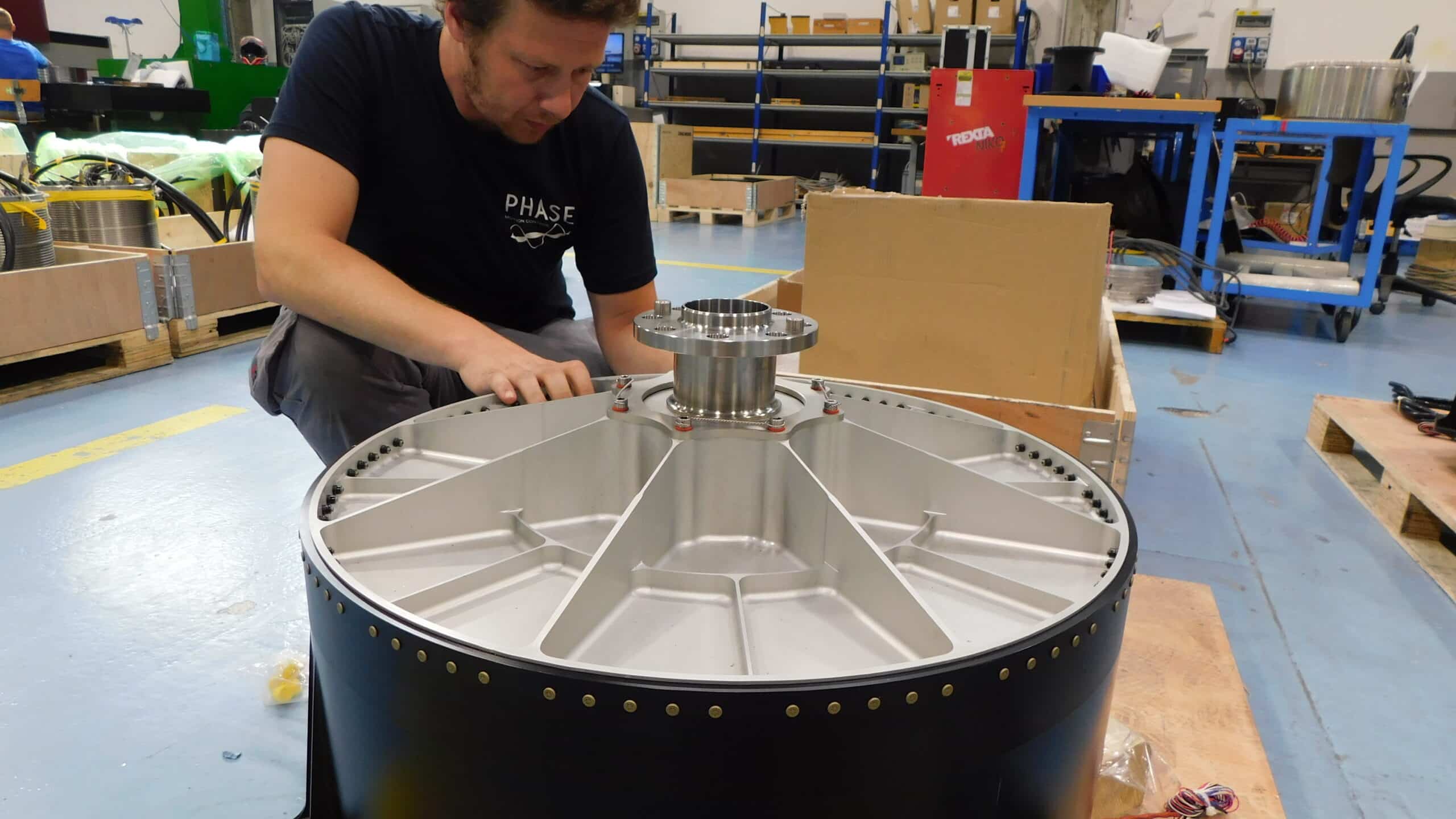
Forniti come unità separate di statore e rotore, i motori coppia TK facilitano il montaggio diretto all’interno delle strutture della macchina. La loro struttura robusta e leggera, caratterizzata da una ritenzione meccanica del magnete senza colla e da manicotti in fibra di carbonio precaricati, garantisce un funzionamento sicuro anche a velocità estremamente elevate.
Sono inoltre possibili numerose opzioni di personalizzazione, come rotori semi-custom e telai con sistemi di raffreddamento integrati per soddisfare i requisiti di applicazioni specifiche.
I motori coppia con tecnlogia Direct Drive in configurazione Frameless garantiscono

I disegni 3D e CAD dei motori coppia serie TK sono disponibili online per la massima facilità di integrazione nei progetti di ingegnerizzazione, machinery design, virtual commissioning, digital twin, per implementazioni su

 * Motor/size/type/options choice with draw preview in the 3D Web Viewer with all typical functions like measure, rotation, sections and orientation
* Motor/size/type/options choice with draw preview in the 3D Web Viewer with all typical functions like measure, rotation, sections and orientation
| Torque Motor code | Stack [mm] | L tot.[mm] | Øout [mm] | Øin [mm] | Torque (Water Cooled) [Nm] | Torque (Air Cooled) [Nm] | Peak Torque [Nm] |
Nominal Speed (rpm) | Max Speed (rpm) |
| TK.085 | 50 | 110 | 96 | 44 | 7,30 | 3,70 | 24,10 | 5000 | 18000 |
| 100 | 160 | 96 | 44 | 16,20 | 8,10 | 48,20 | |||
| 150 | 210 | 96 | 44 | 25,40 | 12,70 | 72,30 | |||
| 200 | 260 | 96 | 44 | 34,70 | 17,40 | 96,40 | |||
| TK.110 | 50 | 125 | 121 | 43 | 12,50 | 6,30 | 33,20 | 5000 | 20000 |
| 100 | 175 | 121 | 43 | 26,90 | 13,50 | 66,30 | |||
| 150 | 225 | 121 | 43 | 41,60 | 20,80 | 99,50 | |||
| 200 | 275 | 121 | 43 | 56,30 | 28,20 | 132,70 | |||
| TK.120 | 50 | 125 | 134 | 54 | 21,90 | 11,00 | 47,50 | 5000 | 15000 |
| 100 | 175 | 134 | 54 | 48,20 | 24,10 | 95,10 | |||
| 150 | 225 | 134 | 54 | 75,10 | 37,60 | 142,60 | |||
| 200 | 275 | 134 | 54 | 102,40 | 51,20 | 190,00 | |||
| TK.164 | 50 | 125 | 173 | 76 | 48,30 | 24,10 | 93,50 | 4000 | 10000 |
| 100 | 175 | 173 | 76 | 104,70 | 52,30 | 187,00 | |||
| 150 | 225 | 173 | 76 | 162,10 | 81,10 | 280,40 | |||
| 200 | 275 | 173 | 76 | 219,90 | 110,00 | 374,00 | |||
| 300 | 375 | 173 | 76 | 336,00 | 168,00 | 560,90 | |||
| TK.188 | 50 | 140 | 202 | 80 | 34,80 | 17,40 | 119,50 | 6000 | 28000 |
| 100 | 90 | 202 | 80 | 79,10 | 39,50 | 238,90 | |||
| 150 | 240 | 202 | 80 | 125,80 | 62,90 | 358,40 | |||
| 200 | 290 | 202 | 80 | 173,60 | 86,80 | 477,80 | |||
| 300 | 390 | 202 | 80 | 270,50 | 135,20 | 716,80 | |||
| TK.195 | 50 | 160 | 207 | 76 | 49,50 | 24,80 | 93,50 | 2000 | 15000 |
| 100 | 210 | 207 | 76 | 108,69 | 54,30 | 187,00 | |||
| 150 | 260 | 207 | 76 | 169,20 | 84,60 | 280,40 | |||
| 200 | 310 | 207 | 76 | 230,20 | 115,00 | 374,00 | |||
| 300 | 410 | 207 | 76 | 352,70 | 176,40 | 560,90 | |||
| TK.220 | 50 | 170 | 240 | 110 | 75,60 | 37,80 | 159,00 | 3000 | 14000 |
| 100 | 220 | 240 | 110 | 172,40 | 86,20 | 318,10 | |||
| 150 | 270 | 240 | 110 | 274,40 | 137,20 | 477,10 | |||
| 200 | 320 | 240 | 110 | 378,70 | 189,30 | 636,20 | |||
| 300 | 420 | 240 | 110 | 590,10 | 295,10 | 954,30 | |||
| TK.240 | 50 | 135 | 249 | 142 | 111,20 | 55,60 | 216,50 | 3000 | 8000 |
| 100 | 185 | 249 | 142 | 240,00 | 120,00 | 433,00 | |||
| 150 | 235 | 249 | 142 | 371,30 | 185,60 | 649,40 | |||
| 200 | 285 | 249 | 142 | 465,90 | 251,60 | 865,90 | |||
| TK.270 | 50 | 140 | 282 | 160 | 112,30 | 56,20 | 282,70 | 3000 | 8000 |
| 100 | 190 | 282 | 160 | 253,00 | 126,50 | 565,50 | |||
| 150 | 240 | 282 | 160 | 399,30 | 199,60 | 848,20 | |||
| 200 | 290 | 282 | 160 | 547,70 | 273,90 | 1.131,00 | |||
| TK.310 | 50 | 120 | 310 | 198 | 215,60 | 107,80 | 373,90 | 500 | 3000 |
| 100 | 170 | 310 | 198 | 475,90 | 238,00 | 748,00 | |||
| 150 | 220 | 310 | 198 | 743,30 | 371,70 | 1.121,80 | |||
| 200 | 270 | 310 | 198 | 1.013,00 | 506,60 | 1.495,70 | |||
| TK.340 | 50 | 145 | 358 | 190 | 242,00 | 121,00 | 407,20 | 2000 | 6000 |
| 100 | 195 | 358 | 190 | 547,20 | 273,60 | 814,30 | |||
| 150 | 245 | 358 | 190 | 864,70 | 432,40 | 1.221,50 | |||
| 200 | 295 | 358 | 190 | 1.186,90 | 593,50 | 1.628,60 | |||
| 300 | 395 | 358 | 190 | 1.837,00 | 918,50 | 2.442,90 | |||
| TK.370 | 50 | 140 | 380 | 268 | 271,70 | 135,90 | 636,20 | 1000 | 4000 |
| 100 | 190 | 380 | 268 | 604,50 | 302,20 | 1.272,30 | |||
| 150 | 240 | 380 | 268 | 947,40 | 473,70 | 1.908,50 | |||
| 200 | 290 | 380 | 268 | 1.294,00 | 647,00 | 2.544,70 | |||
| 300 | 390 | 380 | 268 | 1.991,40 | 995,70 | 3.817,00 | |||
| TK.450 | 50 | 170 | 465 | 320 | 468,20 | 234,10 | 916,10 | 1000 | 3000 |
| 100 | 220 | 465 | 320 | 1.033,70 | 516,90 | 1.832,20 | |||
| 150 | 270 | 465 | 320 | 1.613,00 | 806,50 | 2.748,30 | |||
| 200 | 320 | 465 | 320 | 2.196,90 | 1.098,40 | 3.664,40 | |||
| TK.485 | 50 | 145 | 485 | 345 | 544,00 | 213,00 | 1.068,00 | 1000 | 2000 |
| 100 | 195 | 485 | 345 | 1.197,00 | 500,00 | 2.136,00 | |||
| 150 | 245 | 485 | 345 | 1.858,00 | 802,00 | 3.204,00 | |||
| 200 | 295 | 485 | 345 | 2.521,00 | 1.110,00 | 4.272,00 | |||
| TK.540 | 50 | 145 | 548 | 400 | 712,80 | 356,40 | 1.431,40 | 400 | 1500 |
| 100 | 195 | 548 | 400 | 1.547,50 | 773,80 | 2.862,80 | |||
| 150 | 245 | 548 | 400 | 2.397,40 | 1.198,70 | 4.294,20 | |||
| 200 | 295 | 548 | 400 | 3.252,00 | 1.626,00 | 5.725,60 | |||
| TK.570 | 50 | 115 | 578 | 450 | 745,40 | 372,70 | 1.767,10 | 400 | 1500 |
| 100 | 165 | 578 | 450 | 1.673,00 | 836,50 | 3.534,30 | |||
| 150 | 215 | 578 | 450 | 2.632,50 | 1.316,20 | 5.301,40 | |||
| 200 | 265 | 578 | 450 | 3.603,60 | 1.801,80 | 7.068,60 | |||
| TK.795 | 50 | 160 | 815 | 640 | 1.631,10 | 815,50 | 3.365,40 | 200 | 800 |
| 100 | 210 | 815 | 640 | 3.781,20 | 1.890,60 | 6.730,70 | |||
| 150 | 260 | 815 | 640 | 6.063,60 | 3.031,80 | 10.096,10 | |||
| 200 | 310 | 815 | 640 | 8.402,10 | 4.201,10 | 13.461,40 | |||
| TK.1150 | 50 | 190 | 1210 | 908 | 3.495,00 | 1.785,00 | 6.789,00 | 100 | 400 |
| 100 | 240 | 1210 | 908 | 7.996,00 | 4.281,00 | 13.577,00 | |||
| 150 | 290 | 1210 | 908 | 12.696,00 | 6.952,00 | 20.366,00 | |||
| 200 | 340 | 1210 | 908 | 17.457,00 | 9.695,00 | 27.155,00 | |||
| TK.1340 | 50 | 190 | 1420 | 1100 | 4.542,80 | 2.271,40 | 9.842,30 | 100 | 400 |
| 100 | 240 | 1420 | 1100 | 10.639,40 | 5.319,70 | 19.684,60 | |||
| 150 | 290 | 1420 | 1100 | 17.147,10 | 8.573,50 | 29.526,90 | |||
| 200 | 340 | 1420 | 1100 | 23.831,50 | 11.915,70 | 39.369,20 | |||
| TK.1700 | 50 | 190 | 1770 | 1420 | 8.113,80 | 4.056,90 | 15.946,80 | 100 | 300 |
| 100 | 240 | 1770 | 1420 | 18.951,20 | 9.475,60 | 31.893,50 | |||
| 150 | 290 | 1770 | 1420 | 30.480,20 | 15.240,10 | 47.840,30 | |||
| 200 | 340 | 1770 | 1420 | 42.301,80 | 21.150,90 | 63.787,00 | |||
| TK.2000 | 50 | 260 | 2085 | 1700 | 8.587,40 | 4.293,70 | 23.004,10 | 100 | 300 |
| 100 | 310 | 2085 | 1700 | 20.713,90 | 10.356,90 | 46.008,20 | |||
| 150 | 360 | 2085 | 1700 | 34.103,80 | 17.051,90 | 69.012,30 | |||
| 200 | 410 | 2085 | 1700 | 48.132,40 | 24.066,20 | 92.016,40 | |||
| TK.3080 | 50 | 260 | 3170 | 2760 | 24.318,60 | 12.159,30 | 51.035,20 | 100 | 250 |
| 100 | 310 | 3170 | 2760 | 57.331,50 | 28.665,80 | 102.070,30 | |||
| 150 | 360 | 3170 | 2760 | 92.790,20 | 46.395,10 | 153.105,50 | |||
| 200 | 410 | 3170 | 2760 | 129.340,00 | 64.670,00 | 204.140,70 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}